































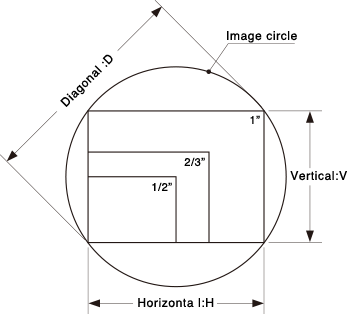
Tamaños de imagen
Existen varios tipos de sensores de imagen para cámaras de automatización industrial, con diferentes tamaños de imagen. La relación de aspecto de una cámara de automatización industrial es normalmente 4:3 (H:V).
| Símbolo del producto | Sensor de imagen | Tamaño de imagen (mm) | ||
|---|---|---|---|---|
| Horizontal: H | Vertical: V | Diagonal: D | ||
| C | 1” | 12,8 | 9,6 | 16,0 |
| H | 2/3” | 8,8 | 6,6 | 11,0 |
| D | 1/2” | 6,4 | 4,8 | 8,0 |
| Objetivo de cámara de 35 mm (Referencia) | Film de 35 mm | 36,0 | 24,0 | 43,3 |
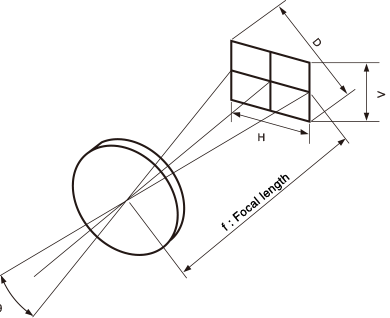
Ángulo de visión
El ángulo de visión es el tamaño del objeto que puede capturarse con un tamaño de imagen especificado.
Se representa mediante una medida angular. Normalmente, el ángulo de visión se mide suponiendo que el objetivo enfoca al infinito. Si se usa un objetivo de la misma longitud focal con un tamaño de imagen diferente, el ángulo de visión será diferente.
P. ej.: Ángulo de visión cuando el tamaño de sensor de la cámara es de 1/2"
y la longitud focal es de 12,5 mm:

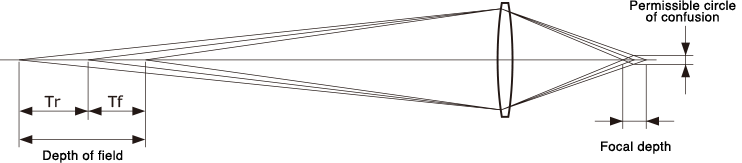
Profundidad de campo
El área que aparece nítida por delante y por detrás del objeto enfocado determina la profundidad de campo. Se debe a que el enfoque aparece nítido si la desalineación del mismo está por debajo de un determinado parámetro. Ese parámetro se denomina círculo de confusión aceptable.
La profundidad de campo tiene las siguientes propiedades:
- 1) Cuanto mayor sea el número f, más amplia será la profundidad de campo.
- 2) Cuanto menor sea la longitud focal, más amplia será la profundidad de campo.
- 3) Cuanto mayor sea la distancia al objeto, más amplia será la profundidad de campo.
- 4) La profundidad de campo por detrás del objeto es más amplia que por delante del objeto.
| Sensor de imagen | Círculo de confusión aceptable |
|---|---|
| 1” | 0,03 mm |
| 2/3” | 0,021 mm |
| 1/2” | 0,015 mm |
| 1/3” | 0,011 mm |
| 1/4” | 0,008 mm |
Se puede calcular la profundidad de campo con la siguiente fórmula:
Profundidad de campo =
Tr+Tf
Profundidad focal =
2δ・F
f: distancia focal
F: número F
δ: diámetro del círculo de confusión aceptable
L: distancia del objeto
Longitud focal
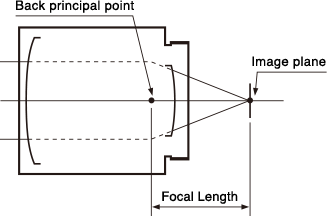
La longitud focal será la distancia desde el punto principal trasero hasta el plano de la imagen.
Cuanto menor sea la longitud focal, más amplio será el plano de imagen.
Luminosidad de un objetivo (número f)
El número f es una indicación de la luminosidad del objetivo. Cuanto menor sea el valor, más luminosa será la imagen que genere. El número f es inversamente proporcional al diámetro efectivo del objetivo y directamente proporcional a la longitud focal.
El valor del número f se determina suponiendo que la transmitancia del objetivo es del 100 %.
Sin embargo, prácticamente todos los objetivos tienen una transmitancia espectral diferente; por lo tanto, objetivos con el mismo número f pueden tener niveles de luminosidad diferentes.

Campo de visión y longitud focal
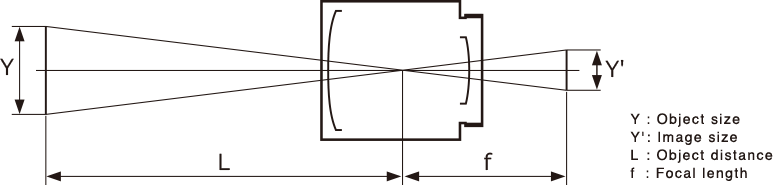
(1) Cómo calcular el campo de visión
Si la distancia al objeto es finita, puede usar la siguiente fórmula para calcular el campo de visión.

P. ej.: Una cámara con sensor CCD de 1/3" se usa con un objetivo de 8 mm, y la distancia al objeto es de 3 m. La anchura horizontal máxima visible en el monitor puede calcularse de la siguiente manera.
- Y': 4,8
- L: 3000
- f: 8

(2) Cómo calcular la longitud focal
Si la distancia al objeto es finita, puede usar la siguiente fórmula para calcular la longitud focal.

P. ej.: Una cámara con sensor CCD de 1/3" se usa con un objetivo de 8 mm, y la distancia al objeto es de 3 m. La anchura horizontal máxima visible en el monitor puede calcularse de la siguiente manera.
- Y': 4,8
- L: 3000
- f: 8

Distorsión
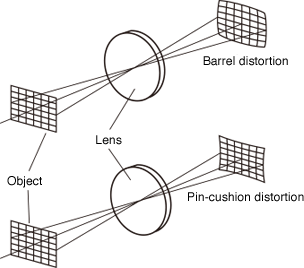
La distorsión es una aberración que provoca que la figura geométrica del objeto no sea reproducida fielmente en el plano de la imagen. Normalmente se representa mediante el desplazamiento de nivel de un punto de la imagen desde su posición ideal por un porcentaje de la altura o anchura de la imagen.
FTM (función de transferencia de modulación)
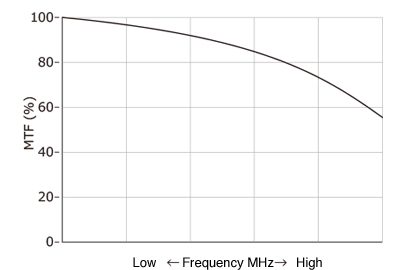
La función de transferencia de modulación (FTM) representa el índice de contraste decreciente al tomar imágenes de un gráfico compuesto por líneas en blanco y negro.